
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.




Saw the real video of a friend who saw it in person , quite a lot work going in IISc banglore
Indian, UK scientists unravel mystery behind origin of plasma jets on Sun | India News - Times of India
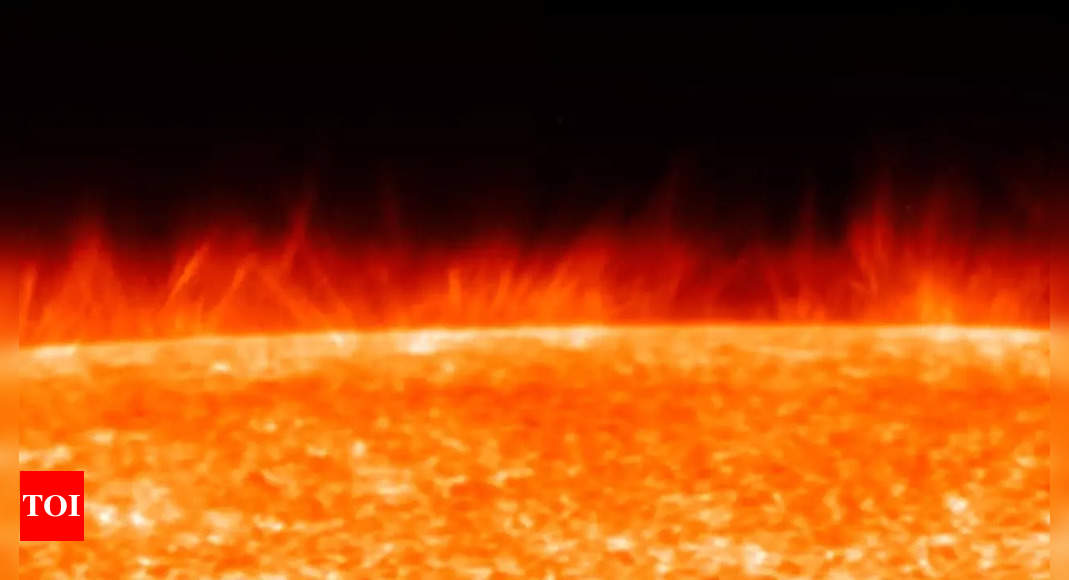
India News: A team of researchers from India and the UK has unravelled the science behind the jets of plasma or spicules that constantly shoot up from the surface.
A team of researchers from India and the UK has unravelled the science behind the jets of plasma or spicules that constantly shoot up from the surface of the Sun and are then brought down by its gravity. The amount of energy and momentum that these spicules carry is of fundamental interest in solar and plasma astrophysics.
Led by astronomers at the Indian Institute of Astrophysics, an autonomous institute of the department of science and technology, the team has explained the origin of the spicules on the Sun using lab experiments as an analogy. The team also used three supercomputers, all from India, to run their massively parallel scientific code. The processes by which plasma is supplied to the solar wind and the solar atmosphere is heated to a million degrees Celsius still remain a puzzle, a statement issued by the S&T department said.
The scientists elaborated that the plasma right below the visible solar surface (photosphere) is perpetually in a state of convection, much like boiling water in a vessel heated at the bottom. This is ultimately powered by the nuclear energy released in the hot-dense core. The convection serves almost periodic but strong kicks to the plasma in the solar chromosphere, the shallow semi-transparent layer right above the visible solar disk. The chromosphere is 500 times lighter than the plasma in the photosphere. Therefore, these strong kicks from the bottom shoot the chromospheric plasma outward at ultrasonic speeds in the form of spicules.
Sahel Dey, researcher from IIA and first author of the study, said, “The solar plasma can be imagined as threaded by magnetic field lines, much like the long chains in polymer solutions. This makes both the systems anisotropic, with properties varying with the direction in space.”
IIA director Annapurni Subramaniam said, “This novel coming together of solar astronomers and condensed matter experimentalists was able to reveal the underlying cause of the poorly understood solar spicules. The power of unifying physics that connects physically disparate phenomena will prove to be the driving force of much more interdisciplinary collaboration."
About 100 kiran remain in use....their retirement approaches...
Some updates on the major programs:
Dr Reddy speaks with Manish Kumar Jha of BW Businessworld on the wide range of technological breakthroughs and innovations which are taking place in DRDO’s laboratories spread across India. He makes major announcement on critical technologies, including aero-engine for AMCA, Rustom II, ATAGS, Light tank, Hypersonic system and Quantum breakthroughs.

 www.businessworld.in
www.businessworld.in
Dr Reddy speaks with Manish Kumar Jha of BW Businessworld on the wide range of technological breakthroughs and innovations which are taking place in DRDO’s laboratories spread across India. He makes major announcement on critical technologies, including aero-engine for AMCA, Rustom II, ATAGS, Light tank, Hypersonic system and Quantum breakthroughs.
DRDO’s Rustom II UAV Has Reached The Target Altitude Of 28,000 ft; No Need to Import ISR Drones: G Satheesh Reddy
In its new avatar, with structural changes and thrust on accountability, DRDO strives to push the boundaries. G Satheesh Reddy, Secretary DDR&D and Chairman DRDO has been responsible for much of the changes lately. In an exclusive interaction, Dr Reddy speaks with Manish Kumar Jha of BW...
India has produced many giants in the field of control theory who have contributed immensely in various branches of this wonderful discipline. Three names that immediately come to my mind are:
(1) Kumpati Narendra (Citations ~ 44000)
Kumpati Narendra - Google Scholar
and
(2) Shankar Sastry (Citations ~104899)
Shankar Sastry's Home Page (berkeley.edu)
Shankar Sastry - Google Scholar
(3) M Vidyasagar (Citations ~37000)
Mathukumalli Vidyasagar - Google Scholar
Out of these, Sastry has the honour and privilege of contributing the most in the field of adaptive control. He has authored several highly citated papers on stability proofs of various adaptive control formulations. Incidentally he is also an alumni of IIT Bombay, BT ’77 batch. Adaptive control has a lot potential benefit over several other control strategies as it renders the possibility of online learning/adaptation in the face of changing plant behaviour.
In recent times, reinforcement learning (RL) has gained enough traction within the controls community. In control theory, it is often implemented via what is known as “adaptive dynamic programming”. The fundamental benefit of this strategy is that approximately optimal policies could be learnt online under various actuator constraints while adhering to Lyapunov-like stability requirements. Several Indian researchers in recent times have made their contribution to this new field such as,
1) Rushikesh Kamalapurkar - Google Scholar
2) Shubhendu Bhasin - Google Scholar
3) Jagannathan Sarangapani or S. Jagannathan or sarangapani Jagannathan - Google Scholar
4) Nitin Sharma - Google Scholar
5) Balaraman Ravindran - Google Scholar
6) Amardeep Mishra - Google Scholar
While several advancements have been made in reinforcement learning (from control theoretic perspective), the aerospace community in general hasn’t embraced the new control strategy. And this has got to do with MIL spec requirements of gain and phase margins. While RL in recent times has been made more rigorous via incorporating both stability and safety (control barrier Lyapunov functions), it still requires certain fundamental assumptions notably those associated with persistency of excitation condition. In addition, a pure adaptive controller requires large gain (learning rate) to adapt itself to lets say large error buildup, large abrupt variation in dynamics etc. It however can potentially destabilize the system by inducing unwanted oscillations especially in systems with significant noise and disturbances.
In Indian context, especially from aerospace industry, considerable effort has been paid to Gain Scheduling-based PID and Model Reference Adaptive Control (MRAC). The prime flight control system of LCA Tejas consists of these two techniques.
Designing And Testing Flight Control Laws Of Light Combat Aircraft [LCA] Tejas [Aero India 2013] - YouTube
The video describes some of the challenges CLAW faced while designing the flight control law for LCA tejas.
03 Challenge in flight control systems Dr Vijay V Patel , ADA Bangalore - YouTube
It could be noted that Dr. Deodhare (an alumni of IIT Bombay BT ’84 batch) has pioneered the flight control development at ADA. In the video below he explains how LCA is not just an aircraft for India, but it represents maturity in various facets of aerospace engineering notably aerodynamic design (wind tunnel testing under various regimes), flight control laws, composites and avionics.
Dr Girish S Deodhare : Distinguished Scientist - YouTube
He beautifully explains as to how ADA and CLAW have created a wealth of knowledge resource within the country to undertake complex aerospace developments that are coming up.
For instance, according to him, the ADA/CLAW team could undertake controls development task for various classes of aircrafts namely:
(1) Tejas Mk2 with canards.
(2) Tailess aircraft design.
(3) Stealth AMCA with twin engine configuration.
While interacting with one of the senior controls engineer (A Ph.D. in flight dynamics and control from IISc Bangalore with more than a decade experience in flight controls), I was told that the Tejas comprises of many control loops for various purposes, some of which are, the primary 3-axis FBW, Mach hold autopilot, stability augmentation system (SAG), various other controllers to improve the damping characteristics etc. These control loops leverage some of the well-known control techniques from literature, for instance the primary 3-axis FBW uses gain scheduling. It entails finding best possible gains for linear state feedback controllers over all the possible operating points in the flight regime.
Similarly, there are certain other control loops that make use of model reference adaptive control (MRAC). In fact, there is a flight recovery controller that recovers the flight from edge case scenarios and bring it back to level flight. This one use sliding mode!
Development of proper flight controls is directly contingent upon extensive wind tunnel tests of various scale models under various mach regimes. These tests reveal the wealth of aerodynamic coefficients ranging from stability derivatives, damping derivatives to controls derivatives. A good mathematic model of an aircraft captures the variation of these coefficients with respect to angle of attack, mach no., side slip, various rates etc. Further, a good model replicates the true physics of flight in simulations thus paving way for controls design. It must be noted that wind tunnels alone are not sufficient, it must have requisite instrumentation setup to capture wide variety of aerodynamic data. India has a multitude of such wind tunnel tests ranging from subsonic, transonic, supersonic to now hypersonic with adequate instrumentation to capture these aerodynamic coefficients.
Wind tunnel test of tejas:
LCA tejas mk2 in wind tunnel tests

Wind tunnel tests of TEDBF:

Wind tunnel tests of AMCA:


In addition, India has developed a full fledged hardware in loop (HIL) system known as "iron bird test rig" that mimics the entire control system on the ground. Here is a brief video on the test rig:
The test rig makes the control development much more realistic as the response of the control signals could be realized on the ground over a real system.
One important challenge he spoke of was time delays. A well-behaved system could easily burst into oscillations and eventually instability if the time delays are not compensated well enough. For linear systems, the time delay compensation is well documented in literature and has been leveraged in the FBW design. However, for more fancy RL-based control strategies large time delays present a grave challenge.
@Nilgiri @Joe Shearer @T-123456
(1) Kumpati Narendra (Citations ~ 44000)
Kumpati Narendra - Google Scholar
and
(2) Shankar Sastry (Citations ~104899)
Shankar Sastry's Home Page (berkeley.edu)
Shankar Sastry - Google Scholar
(3) M Vidyasagar (Citations ~37000)
Mathukumalli Vidyasagar - Google Scholar
Out of these, Sastry has the honour and privilege of contributing the most in the field of adaptive control. He has authored several highly citated papers on stability proofs of various adaptive control formulations. Incidentally he is also an alumni of IIT Bombay, BT ’77 batch. Adaptive control has a lot potential benefit over several other control strategies as it renders the possibility of online learning/adaptation in the face of changing plant behaviour.
In recent times, reinforcement learning (RL) has gained enough traction within the controls community. In control theory, it is often implemented via what is known as “adaptive dynamic programming”. The fundamental benefit of this strategy is that approximately optimal policies could be learnt online under various actuator constraints while adhering to Lyapunov-like stability requirements. Several Indian researchers in recent times have made their contribution to this new field such as,
1) Rushikesh Kamalapurkar - Google Scholar
2) Shubhendu Bhasin - Google Scholar
3) Jagannathan Sarangapani or S. Jagannathan or sarangapani Jagannathan - Google Scholar
4) Nitin Sharma - Google Scholar
5) Balaraman Ravindran - Google Scholar
6) Amardeep Mishra - Google Scholar
While several advancements have been made in reinforcement learning (from control theoretic perspective), the aerospace community in general hasn’t embraced the new control strategy. And this has got to do with MIL spec requirements of gain and phase margins. While RL in recent times has been made more rigorous via incorporating both stability and safety (control barrier Lyapunov functions), it still requires certain fundamental assumptions notably those associated with persistency of excitation condition. In addition, a pure adaptive controller requires large gain (learning rate) to adapt itself to lets say large error buildup, large abrupt variation in dynamics etc. It however can potentially destabilize the system by inducing unwanted oscillations especially in systems with significant noise and disturbances.
In Indian context, especially from aerospace industry, considerable effort has been paid to Gain Scheduling-based PID and Model Reference Adaptive Control (MRAC). The prime flight control system of LCA Tejas consists of these two techniques.
Designing And Testing Flight Control Laws Of Light Combat Aircraft [LCA] Tejas [Aero India 2013] - YouTube
The video describes some of the challenges CLAW faced while designing the flight control law for LCA tejas.
03 Challenge in flight control systems Dr Vijay V Patel , ADA Bangalore - YouTube
It could be noted that Dr. Deodhare (an alumni of IIT Bombay BT ’84 batch) has pioneered the flight control development at ADA. In the video below he explains how LCA is not just an aircraft for India, but it represents maturity in various facets of aerospace engineering notably aerodynamic design (wind tunnel testing under various regimes), flight control laws, composites and avionics.
Dr Girish S Deodhare : Distinguished Scientist - YouTube
He beautifully explains as to how ADA and CLAW have created a wealth of knowledge resource within the country to undertake complex aerospace developments that are coming up.
For instance, according to him, the ADA/CLAW team could undertake controls development task for various classes of aircrafts namely:
(1) Tejas Mk2 with canards.
(2) Tailess aircraft design.
(3) Stealth AMCA with twin engine configuration.
While interacting with one of the senior controls engineer (A Ph.D. in flight dynamics and control from IISc Bangalore with more than a decade experience in flight controls), I was told that the Tejas comprises of many control loops for various purposes, some of which are, the primary 3-axis FBW, Mach hold autopilot, stability augmentation system (SAG), various other controllers to improve the damping characteristics etc. These control loops leverage some of the well-known control techniques from literature, for instance the primary 3-axis FBW uses gain scheduling. It entails finding best possible gains for linear state feedback controllers over all the possible operating points in the flight regime.
Similarly, there are certain other control loops that make use of model reference adaptive control (MRAC). In fact, there is a flight recovery controller that recovers the flight from edge case scenarios and bring it back to level flight. This one use sliding mode!
Development of proper flight controls is directly contingent upon extensive wind tunnel tests of various scale models under various mach regimes. These tests reveal the wealth of aerodynamic coefficients ranging from stability derivatives, damping derivatives to controls derivatives. A good mathematic model of an aircraft captures the variation of these coefficients with respect to angle of attack, mach no., side slip, various rates etc. Further, a good model replicates the true physics of flight in simulations thus paving way for controls design. It must be noted that wind tunnels alone are not sufficient, it must have requisite instrumentation setup to capture wide variety of aerodynamic data. India has a multitude of such wind tunnel tests ranging from subsonic, transonic, supersonic to now hypersonic with adequate instrumentation to capture these aerodynamic coefficients.
Wind tunnel test of tejas:
LCA tejas mk2 in wind tunnel tests
Wind tunnel tests of TEDBF:
Wind tunnel tests of AMCA:
In addition, India has developed a full fledged hardware in loop (HIL) system known as "iron bird test rig" that mimics the entire control system on the ground. Here is a brief video on the test rig:
One important challenge he spoke of was time delays. A well-behaved system could easily burst into oscillations and eventually instability if the time delays are not compensated well enough. For linear systems, the time delay compensation is well documented in literature and has been leveraged in the FBW design. However, for more fancy RL-based control strategies large time delays present a grave challenge.
@Nilgiri @Joe Shearer @T-123456
Last edited:
Some reason I didn't get your tag....could be a glitch (I think forum also recently changed some settings for very new members needing 10 posts etc before features come online).
I will go through all of this a bit later @Amardeep Mishra and give any points I think worth adding/expanding.
Pilot induced oscillation was a pretty bad example of this.... before FBW systems matured to nip such things in the bud.
In my stability and control course back in the day.... there was a whole list of topics we went through on this kind of thing.
I will go through all of this a bit later @Amardeep Mishra and give any points I think worth adding/expanding.
A well-behaved system could easily burst into oscillations and eventually instability if the time delays are not compensated well enough.
Pilot induced oscillation was a pretty bad example of this.... before FBW systems matured to nip such things in the bud.
In my stability and control course back in the day.... there was a whole list of topics we went through on this kind of thing.
In addition, India has developed a full fledged hardware in loop (HIL) system known as "iron bird test rig" that mimics the entire control system on the ground. Here is a brief video on the test rig:
The test rig makes the control development much more realistic as the response of the control signals could be realized on the ground over a real system.
These days do they generally find any major flaws in the hardware rig testing + cert process for this discipline?
Or is it mostly a nominal (but important) validation step?
IA already procured Tonbo's T-Rex which serves the same purpose and has been deployed along LAC flash points and North East. These Tata modules might be for our western sector